In this class we discussed one of the major problems in the mobile robots field witch is as the title says how to move your robot to an exact distance nothing more and nothing less.
Moving the robot to a known position is crucial in some cases, so in this class ls will learn how to convert wanted distance measured with a measuring tool to an order in the move block.
Every group take a wheel and move the wheel from a start point one rotation. Then move the wheel from the exact start point twice.
ls will know that the number of rotation traveled by the wheel is one responsible for how much the robot will move.
Now try with smaller wheel do one rotation then 2, ls will notice that even the wheel traveled the same unit it doesn't travel the same distance as the bigger wheel so here you introduce to them the principal of calculating the circumference.
Measuring circumference of the taskbot wheel:
Start by measure the circumference of the robot practically using standard measuring tools.
Then write the result for each group.
ls will notice that the results are not the same so there are an incertitude factor during the measuring.
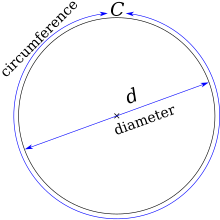
The solution is to calculate the circumference using already knowing informations:

We used the famous formula : ( D = 2.25 inche/5.751 centimeters , Pi = 3.14)
Moving the robot to a known position is crucial in some cases, so in this class ls will learn how to convert wanted distance measured with a measuring tool to an order in the move block.
Every group take a wheel and move the wheel from a start point one rotation. Then move the wheel from the exact start point twice.
ls will know that the number of rotation traveled by the wheel is one responsible for how much the robot will move.
Now try with smaller wheel do one rotation then 2, ls will notice that even the wheel traveled the same unit it doesn't travel the same distance as the bigger wheel so here you introduce to them the principal of calculating the circumference.
Measuring circumference of the taskbot wheel:
Start by measure the circumference of the robot practically using standard measuring tools.
Then write the result for each group.
ls will notice that the results are not the same so there are an incertitude factor during the measuring.
The solution is to calculate the circumference using already knowing informations:
We used the famous formula : ( D = 2.25 inche/5.751 centimeters , Pi = 3.14)
C = Pi * D
C= 17.49 cm
A mission to 59.5 cm:
This is an example to demonstrate this new way for using the move block.
So our objective is that the robot go exactly 59.5 cm
We have to calculate the number of rotations needed to put in the move block.
The operation is simple: we divide the desired distance on the circumference of the wheel.
number of rotations needed = 59.5/17.49 = 3.4
So the number of rotations needed is 3.4
Aucun commentaire:
Enregistrer un commentaire